Problem
Two random points, one red and one blue, are chosen uniformly and independently from the interior of a square. To ten decimal places, what is the probability that there exists a point on the side of the square closest to the blue point that is equidistant to both the blue point and the red point?
Computational Solution
We use simple Monte-Carlo simulation to estimate the probability. From high school geometry, we know that the point on the side of the square nearest to the blue point which is equidistant from both the red and blue points has to lie on the perpendicular bisector of the line segment joining and . This gives rise to the following procedure:
-
Choose two points randomly within the square. Label one of the points red and the other one blue.
-
Identify the side of the square nearest to the blue point. Here is the snippet of the Python code for doing this:
distances = [
(abs(B[1] - 0), 'bottom'), # Bottom
(abs(B[1] - 1), 'top'), # Top
(abs(B[0] - 0), 'left'), # Left
(abs(B[0] - 1), 'right') # Right
]
nearest_side = min(distances, key=lambda x: x[0])[1]
- We then find the equation of the perpendicular bisector of line segment and check whether it intersects the side of the square nearest to the blue point as follows:
# Calculate midpoint and direction vector of perpendicular bisector
midpoint = (A + B) / 2
direction = B - A
perp_vector = np.array([-direction[1], direction[0]]) # Rotate 90 degrees
# Normalize perpendicular vector
length = np.linalg.norm(perp_vector)
if length == 0:
return False, nearest_side, None
perp_vector = perp_vector / length
# Calculate intersection based on nearest side
intersection = None
success = False
if nearest_side == 'bottom':
if perp_vector[1] != 0:
t = (0 - midpoint[1]) / perp_vector[1]
x = midpoint[0] + t * perp_vector[0]
intersection = np.array([x, 0])
success = 0 <= x <= 1
elif nearest_side == 'top':
if perp_vector[1] != 0:
t = (1 - midpoint[1]) / perp_vector[1]
x = midpoint[0] + t * perp_vector[0]
intersection = np.array([x, 1])
success = 0 <= x <= 1
elif nearest_side == 'left':
if perp_vector[0] != 0:
t = (0 - midpoint[0]) / perp_vector[0]
y = midpoint[1] + t * perp_vector[1]
intersection = np.array([0, y])
success = 0 <= y <= 1
else: # right
if perp_vector[0] != 0:
t = (1 - midpoint[0]) / perp_vector[0]
y = midpoint[1] + t * perp_vector[1]
intersection = np.array([1, y])
success = 0 <= y <= 1
- Repeat the above steps a million times and count the number of times we have a valid intersection point.
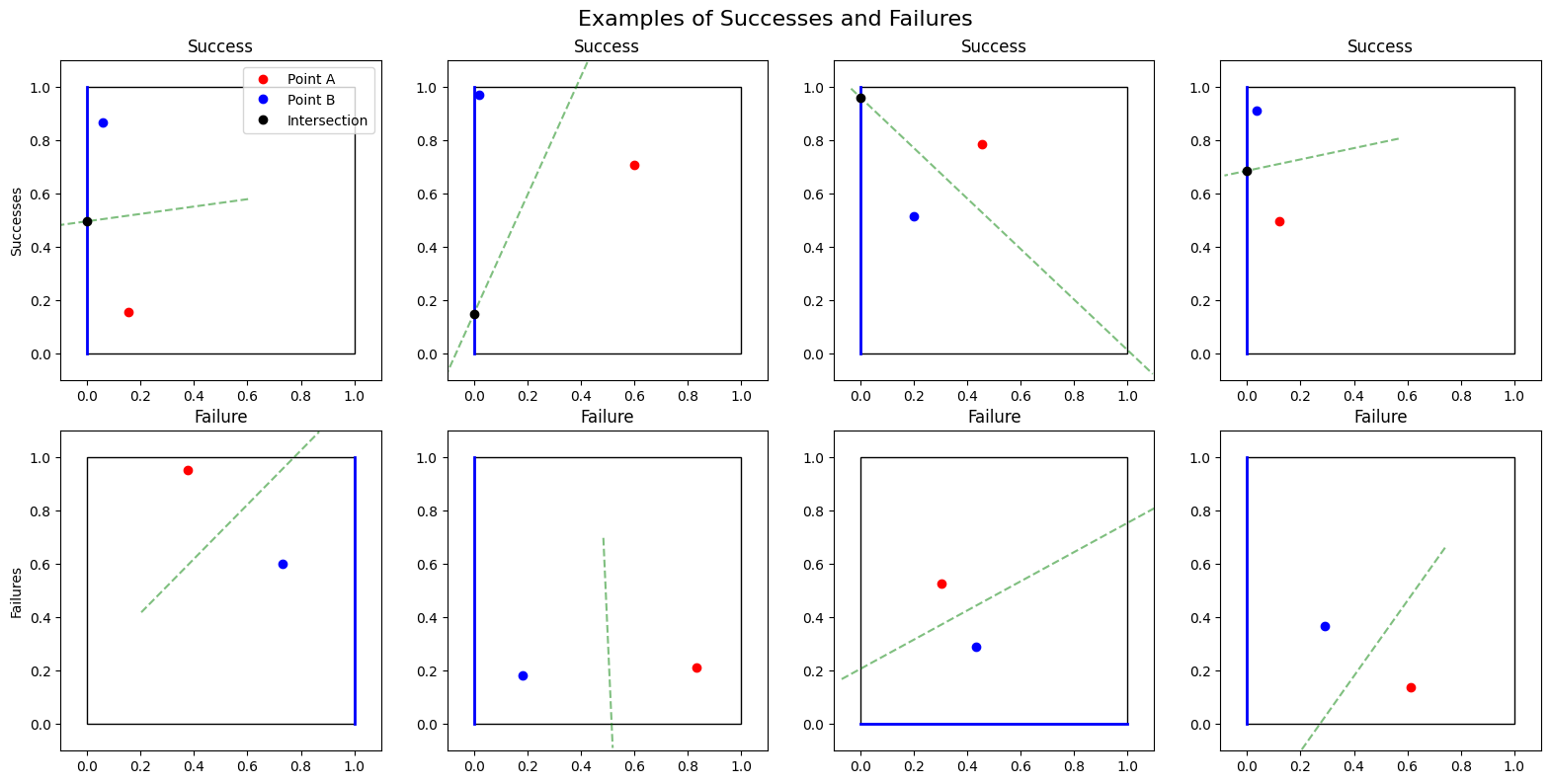
Using the above procedure we see that the required probability is which is slightly under half.
Here is a visualization of a few random examples to check that the code is working as expected:
Python code
The complete Python code is given below:
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.patches import Rectangle
from typing import List, Tuple
def check_intersection(A: np.ndarray, B: np.ndarray) -> Tuple[bool, str, np.ndarray]:
"""
Check intersection and return success status, nearest side, and intersection point
"""
# Find nearest side to B
distances = [
(abs(B[1] - 0), 'bottom'), # Bottom
(abs(B[1] - 1), 'top'), # Top
(abs(B[0] - 0), 'left'), # Left
(abs(B[0] - 1), 'right') # Right
]
nearest_side = min(distances, key=lambda x: x[0])[1]
# Calculate midpoint and direction vector of perpendicular bisector
midpoint = (A + B) / 2
direction = B - A
perp_vector = np.array([-direction[1], direction[0]]) # Rotate 90 degrees
# Normalize perpendicular vector
length = np.linalg.norm(perp_vector)
if length == 0:
return False, nearest_side, None
perp_vector = perp_vector / length
# Calculate intersection based on nearest side
intersection = None
success = False
if nearest_side == 'bottom':
if perp_vector[1] != 0:
t = (0 - midpoint[1]) / perp_vector[1]
x = midpoint[0] + t * perp_vector[0]
intersection = np.array([x, 0])
success = 0 <= x <= 1
elif nearest_side == 'top':
if perp_vector[1] != 0:
t = (1 - midpoint[1]) / perp_vector[1]
x = midpoint[0] + t * perp_vector[0]
intersection = np.array([x, 1])
success = 0 <= x <= 1
elif nearest_side == 'left':
if perp_vector[0] != 0:
t = (0 - midpoint[0]) / perp_vector[0]
y = midpoint[1] + t * perp_vector[1]
intersection = np.array([0, y])
success = 0 <= y <= 1
else: # right
if perp_vector[0] != 0:
t = (1 - midpoint[0]) / perp_vector[0]
y = midpoint[1] + t * perp_vector[1]
intersection = np.array([1, y])
success = 0 <= y <= 1
return success, nearest_side, intersection
def plot_example(ax, A: np.ndarray, B: np.ndarray, success: bool):
"""Plot a single example"""
# Plot unit square
ax.add_patch(Rectangle((0, 0), 1, 1, fill=False, color='black'))
# Get intersection info
is_success, nearest_side, intersection = check_intersection(A, B)
# Plot nearest side in blue
if nearest_side == 'bottom':
ax.plot([0, 1], [0, 0], 'b-', linewidth=2)
elif nearest_side == 'top':
ax.plot([0, 1], [1, 1], 'b-', linewidth=2)
elif nearest_side == 'left':
ax.plot([0, 0], [0, 1], 'b-', linewidth=2)
else: # right
ax.plot([1, 1], [0, 1], 'b-', linewidth=2)
# Plot perpendicular bisector
midpoint = (A + B) / 2
direction = B - A
perp_vector = np.array([-direction[1], direction[0]])
if np.linalg.norm(perp_vector) > 0:
perp_vector = perp_vector / np.linalg.norm(perp_vector)
t_values = np.linspace(-0.5, 1.5, 100)
line_points = np.array([(midpoint[0] + t * perp_vector[0],
midpoint[1] + t * perp_vector[1]) for t in t_values])
valid_points = line_points[
(line_points[:, 0] >= -0.1) & (line_points[:, 0] <= 1.1) &
(line_points[:, 1] >= -0.1) & (line_points[:, 1] <= 1.1)
]
if len(valid_points) > 0:
ax.plot(valid_points[:, 0], valid_points[:, 1], 'g--', alpha=0.5)
# Plot points
ax.plot(A[0], A[1], 'ro', label='Point A')
ax.plot(B[0], B[1], 'bo', label='Point B')
# Plot intersection point if it exists
if intersection is not None:
ax.plot(intersection[0], intersection[1], 'ko', label='Intersection')
# Set title and limits
ax.set_title(f"{'Success' if success else 'Failure'}")
ax.set_xlim(-0.1, 1.1)
ax.set_ylim(-0.1, 1.1)
ax.set_aspect('equal')
# Run simulation and collect examples
np.random.seed(42)
num_trials = 1_000_000
successes = []
failures = []
while len(successes) < 4 or len(failures) < 4:
A = np.random.random(2)
B = np.random.random(2)
success, _, _ = check_intersection(A, B)
if success and len(successes) < 4:
successes.append((A, B))
elif not success and len(failures) < 4:
failures.append((A, B))
# Create visualization grid
fig, axs = plt.subplots(2, 4, figsize=(16, 8))
fig.suptitle('Examples of Successes and Failures', fontsize=16)
# Plot successes on top row
for i, (A, B) in enumerate(successes):
plot_example(axs[0, i], A, B, True)
axs[0, 0].set_ylabel('Successes')
# Plot failures on bottom row
for i, (A, B) in enumerate(failures):
plot_example(axs[1, i], A, B, False)
axs[1, 0].set_ylabel('Failures')
# Add legend to first plot only
axs[0, 0].legend()
plt.tight_layout()
plt.show()
# Run full simulation for probability
all_points = np.random.random((2, num_trials, 2))
A_points = all_points[0]
B_points = all_points[1]
total_successes = sum(check_intersection(A_points[i], B_points[i])[0]
for i in range(num_trials))
probability = total_successes / num_trials
print(f"\nFull Simulation Results:")
print(f"Number of trials: {num_trials:,}")
print(f"Number of successes: {total_successes:,}")
print(f"Probability: {probability:.6f}")